The project aims to develop and demonstrate, by the development of ground functional breadboards, key technologies for ADR, including the capture systems and a vision based navigation system, including target in-situ recognition and properties assessment.
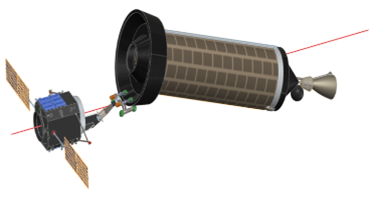
The project focuses in particular in-space capture concepts for large space debris, such as upper stages of elderly launchers or decommissioned satellites. For these, a non-collaborative rendez-vous and capture procedure, to be performed by a robotic spacecraft (namely “chaser”), is required.
Such enabling technologies include:
-
techniques for orbital recognition of the target debris, based on images obtained in-situ by the chaser spacecraft via optical sensors
-
technologies of autonomous guidance, navigation and control for phases of close rendez-vous, final approach and capture
-
technologies, strategies and concepts for target capture and solidarization
Final test video:
For more informations visit CADET microsite: www.aviospace.com/cadet
